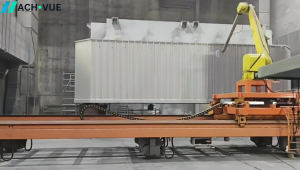
在工业自动化不断发展的今天,机械手的智能抓取技术已经在室内场景(如托盘拆垛、拣选等)得到广泛应用。然而,面对户外环境与大型空间(如15米长的货车车厢),传统的3D摄像头方案却面临诸多挑战。为此,杉维科技推出了摄像头+激光雷达融合识别方案,为户外智能抓取打开了全新局面。
项目背景:传统3D视觉在户外的局限
本项目客户是一家专注于机械手自动化解决方案的技术企业,其产品已广泛应用于室内托盘拆垛、小型货物抓取等场景。
然而当客户将应用场景拓展至户外、15米长的大型货车车厢内的货物抓取时,传统使用的3D摄像头方案便遇到了技术瓶颈:
- 探测距离有限:主流3D摄像头的有效探测距离通常不超过6米,远远无法覆盖15米长的车厢全景;
- 对环境光敏感:在户外光照变化频繁,强光或背光环境极易影响摄像头的深度测量精度;
- 空间尺度复杂:车厢内部结构复杂,货物尺寸、位置多变,传统单一视觉难以支撑精准操作。
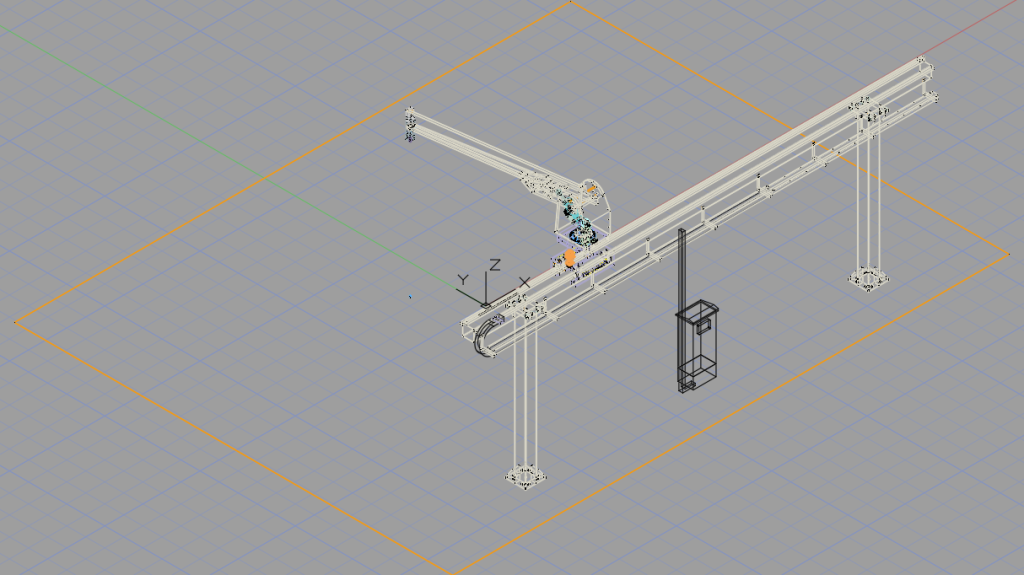
杉维科技解决方案:激光雷达+视觉融合感知系统
为了应对这些挑战,杉维科技提供了一套融合感知解决方案,将激光雷达的高精度空间建图能力与客户原有的图像识别与3D检测算法进行无缝集成,形成一套适用于大场景、高动态环境的货物识别与定位系统。
关键技术亮点:
- 远距离高精度识别
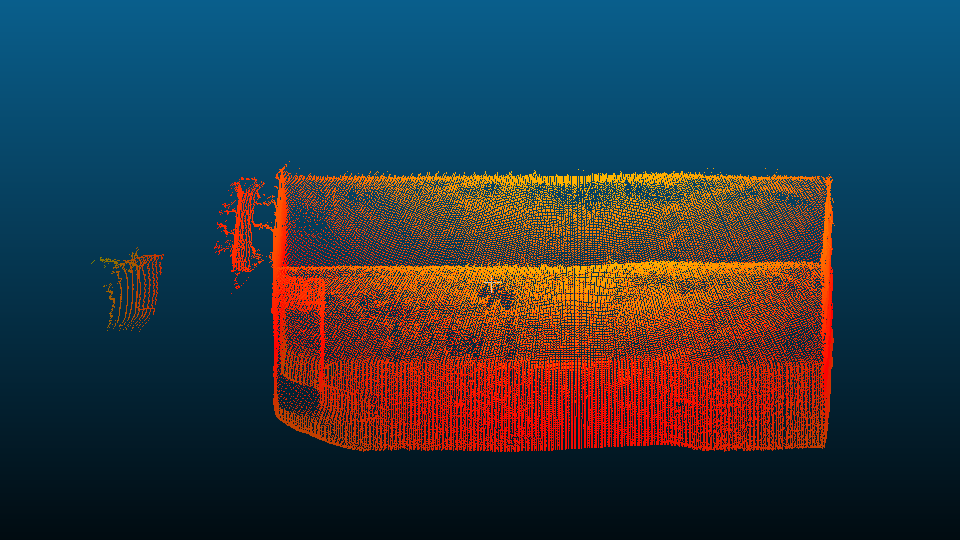
杉维自研2D/3D激光雷达系统具备最长80米测距能力,轻松覆盖整车车厢,实现完整货物空间扫描。 - 光照鲁棒性强
激光雷达对环境光完全不敏感,保障在强光、阴影、雨雪等复杂气候条件下依然具备稳定识别能力。 - 三维建模+车厢结构识别
系统不仅可以识别货物,还可精确识别车厢的位置、尺寸与高度,实时构建三维空间边界,有效避免机械臂在操作中与车厢发生碰撞,保障系统运行安全。 - 融合图像算法,继承原有AI模型
客户原有的AI图像识别和3D检测算法可以继续沿用,通过坐标系映射,融合视觉识别结果与雷达构建的点云模型,实现目标物的精准三维定位。 - 低成本部署、模块化集成
系统支持快速部署与现场适配,适用于改造现有机械臂工作站,无需替换现有算法框架。
应用价值

通过部署杉维科技的融合感知系统,客户的机械手臂已成功实现:
- ✅ 在15米车厢范围内稳定识别货物位置与结构边界
- ✅ 全天候环境下持续运行,不再受限于光照变化
- ✅ 精确提取货物与车厢三维坐标,避免碰撞、优化路径规划
- ✅ 提升作业效率30%以上,降低人工干预和误抓风险
结语
随着自动化技术向户外、高难度场景拓展,单一的感知方案已无法满足工业需求。杉维科技通过激光雷达与视觉系统融合,为自动抓取系统注入新动能,让智能机械手不仅“看得见”,更能“抓得准”,还“不会撞”。
欢迎联系我们,了解杉维科技的3D视觉解决方案如何为您的项目赋能!