一、从“三维”到“四维”:什么是4D点云?
点云(Point Cloud)是一组包含三维坐标(X, Y, Z)的空间点集,每个点还可以附带颜色、反射强度等信息。你可以把它想象成用数百万个点给工地拍了一张“有坐标的照片”。
3D点云:静态的、某一时刻的工地几何形态。比如某天上午10点扫描的基坑,就是一个3D点云。
4D点云:在3D的基础上增加了时间维度。通过在同一位置持续扫描(例如每天一次),就形成了“点云时间序列”。4D点云不仅能告诉你“基坑是什么形状”,还能告诉你“形状如何随时间变化”——哪里在开挖、哪里在回填、边坡是否有位移。
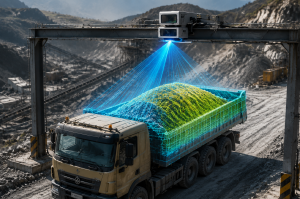
香港项目中,固定式LiDAR节点以设定的频率(比如每小时或每天)自动采集点云,这些数据按时间戳存储,就构成了工地的4D数字记录。
二、LiDAR + 摄像头:精度与语义的互补
单独使用摄像头,可以得到丰富的纹理和颜色,但无法直接测量距离或生成三维坐标。单独使用LiDAR,可以得到精确的三维点云,但缺乏颜色和视觉语义(比如“这是一个人还是一根钢筋”)。
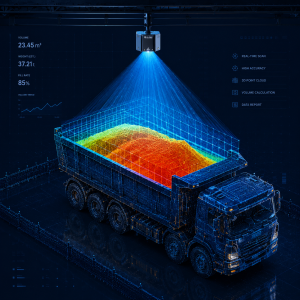
因此,报告中的方案采用传感器融合:在同一节点上安装LiDAR和高清摄像头,经过标定后,将摄像头的RGB像素映射到LiDAR的点云上,生成真彩点云。
这样做有两个直接好处:
- 可视化友好:点云不再是灰白色或按高度着色的“雾状图”,而是接近真实世界的彩色模型,便于非专业人员理解。
- AI检测基础:彩色点云可以同时利用几何特征和颜色特征,提高物体检测(如安全背心、人员、机械)的准确率。
报告中未披露LiDAR的具体测距精度数值,但从其能够支持体积计算和BIM比对来看,属于工业级高精度设备。
三、边缘计算:为什么数据不能全传云端?
一个5公顷的工地,如果每个LiDAR节点每秒产生数十万个点,再加上高清视频流,数据量会非常巨大。直接全部传到云端,既占用带宽,又增加延迟。
因此,系统在每个节点部署了边缘处理器。边缘处理器的任务包括:
- 数据压缩:将原始点云和图像进行无损或有损压缩,减少传输量。
- 初步建模:在本地生成初步的彩色点云模型,而不是传输原始激光回波信号。
- 实时检测:一些简单的安全规则(如地理围栏闯入)可以在边缘端直接判断并触发本地警报,无需等待云端回传。
边缘处理后的数据再通过5G路由器上传到云端。报告提到,经过后端优化和Wi-Fi设置调整后,系统响应时间提升了约35%,其中边缘计算功不可没。
四、AI检测模型:如何识别“危险区闯入”和“安全背心”?
报告详细描述了两类安全违规的自动化检测机制。
1.危险区闯入检测(动态地理围栏)
- 地理围栏定义:在云端或边缘端,为每个危险区域(如深基坑边缘、爆破警戒区)设定一组三维边界。这些边界可以是规则的立方体,也可以是不规则的多面体。
- 实时定位:LiDAR点云中,人员或设备会被检测为目标对象(通过点云聚类或深度学习模型),系统实时计算其三维坐标。
- 闯入判断:将目标坐标与地理围栏边界进行空间包含测试。一旦进入,立即触发警报。
报告特别提到“动态地理围栏”——这意味着围栏可以随施工阶段变化而调整,比如某区域今天还在开挖、明天开始浇筑,危险区边界就可以在软件中重新绘制,无需物理移动传感器。
2.安全背心检测
- 数据来源:主要依赖摄像头的视频流(因为颜色信息对PPE识别至关重要),但也可以结合点云中的反射强度特征(安全背心通常有高反光材料)。
- AI模型:采用目标检测网络(报告中提到IA-SSD等深度学习模型),在图像中定位人体,然后分类是否穿戴安全背心。
- 输出:当检测到未穿戴安全背心的工人时,系统记录违规事件(包含时间、位置、截图),并通过仪表板或即时消息推送通知。
报告没有单独披露安全功能的漏报率或准确率,但从整体UAT通过率约90%以及护理期针对用户反馈进行优化来看,这些功能在实际工地环境中达到了可用的可靠性水平。
五、点云到BIM比对:进度追踪的核心算法
这是报告中最具工程价值的技术点之一。
输入:
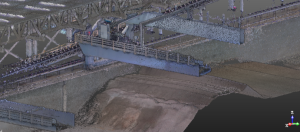
- 当天的真彩点云(带地理坐标)
- 项目的BIM模型(通常是IFC或Revit格式,也带地理坐标)
处理流程:
1.配准:将点云与BIM模型进行刚体变换(平移+旋转),使两者在空间上精确对齐。报告提到使用了“地理参照锚点”来优化配准精度。
2.分割:从点云中分割出目标区域,比如“需要开挖的土体”或“已浇筑的混凝土结构”。
3.差异计算:
- 对于开挖工程:计算点云中地表面与BIM中设计地表面之间的体积差,得到“已开挖量”和“剩余量”。
- 对于结构工程:计算实际点云与BIM模型之间的法向距离,生成偏差色谱图(红色表示突出,蓝色表示欠缺)。
4.输出:可视化差异图 + 量化数据(体积差、面积差、最大偏差位置等)。
报告中提到,在护理期内,地面水平计算算法根据用户反馈进行了更新,更新后开挖跟踪的精度“显著提高”。这表明算法并非一次性定型,而是通过与现场实测数据的闭环反馈持续优化。
六、大语言模型(LLM)在工地管理中的角色
报告的一个亮点是将大语言模型引入工地管理报告系统。注意:LLM并不是用来控制LiDAR或做几何计算的,而是用于自然语言交互和报告生成。
系统架构(基于AWS)分为三个流程:
1.自动报告生成:定时(如每天凌晨)从数据库中提取关键数据(安全违规次数、进度偏差、IoT传感器读数等),通过API触发LLM服务,LLM按照预设模板生成文字描述和摘要,最终输出格式化的PDF或HTML报告,存储到云存储。
2.按需报告下载:用户通过Web仪表板点击“生成最新报告”,系统即时从数据库拉取最新数据,调用LLM生成报告并返回。
3.实时聊天界面:用户可以用自然语言提问,例如“过去一周发生了多少次危险区闯入?”或“A区开挖进度比计划慢了多少?”。LLM将问题转化为数据库查询,获取结果后生成自然语言答案返回。
报告指出,经过护理期的微调(fine-tuning),LLM处理特定领域查询的准确性进一步提高。这说明LLM在工地管理中的应用需要基于实际数据做领域适配。
七、完整数据流:从传感器到仪表板
综合以上技术模块,整个系统的数据流可以概括为:
1.采集层:固定式LiDAR + 摄像头 + IoT传感器(空气、温湿度、振动、倾斜)实时采集原始数据。
2.边缘层:每个节点进行数据压缩、初步建模、本地缓存(节点存储),并通过5G路由器上传。
3.云端层:
- 数据后处理(配准、滤波、分类)
- 存入关系数据库
- AI模型运行(安全检测、进度比对)
- LLM服务(报告生成、聊天)
4.应用层:Web仪表板展示实时点云、视频流、警报、进度图表;用户通过仪表板下载报告或使用聊天功能。
报告特别强调了“边缘+云”协同的必要性:边缘负责实时性和带宽优化,云端负责复杂计算和数据持久化。
八、这项技术目前处于什么成熟度?
香港EMSD的报告给出了明确的结论:“功能完善、技术稳定、可供用户使用。” 并且UAT通过率约90%,响应时间在负载下优化了约35%(原文:“resulting in a ~35% improvement in response times under load”)。
但也要看到,报告提到了一些前期问题:网络连接不稳定、用户界面不友好、体积算法不准确等。这些问题通过“软启动→反馈收集→护理期改进”的流程得到了解决。
这意味着:固定式LiDAR+AI+4D点云的工地监控技术,已经从实验室原型阶段走出,进入了工程可用阶段,但仍需要在真实工地环境中进行迭代打磨。对于考虑引入类似技术的企业,建议预留1-3个月的试运行和优化期。
写在最后
这份报告向我们展示了一个完整的技术栈:从LiDAR和摄像头的硬件融合,到边缘计算和5G的数据传输,再到AI检测和大语言模型的智能分析,最后落地为一个工地管理者可以日常使用的Web仪表板。技术不再是孤立的“传感器”或“算法”,而是一套可部署、可验证、可迭代的系统。元朗工地的12个月运行数据,为整个行业提供了一个宝贵的技术基准。